In the framework of the PRISMA R&D program, funded by the Swedish National Space Board (SNSB) and primed by the Swedish Space Corporation (SSC), TSD developed a camera system for small space platform, able to offer 4Mpixel resolution real time color video image acquisition, compression, storage and encoding.
The PRISMA mission was primarly a RVD and Formation Flying technology test bed. It consisted of 2 spacecrafts – named Mango (Main spacecraft) and Tango (Target Spacecraft) – orbiting in LEO sun-synchronous orbit at around 600-1000 km.
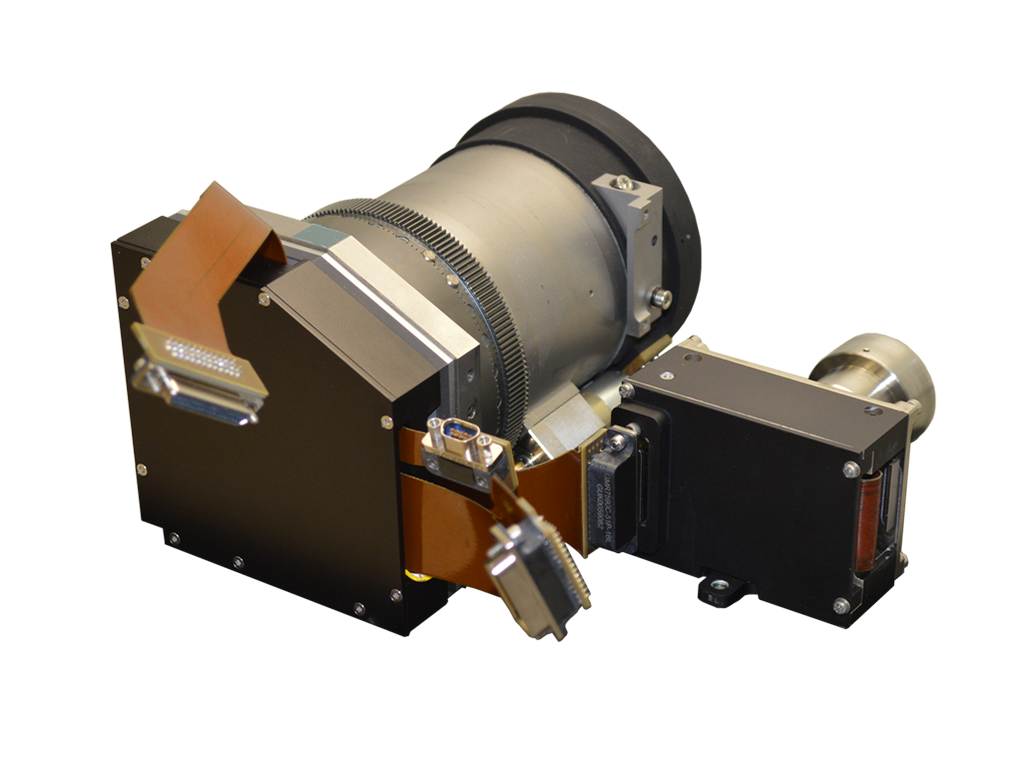
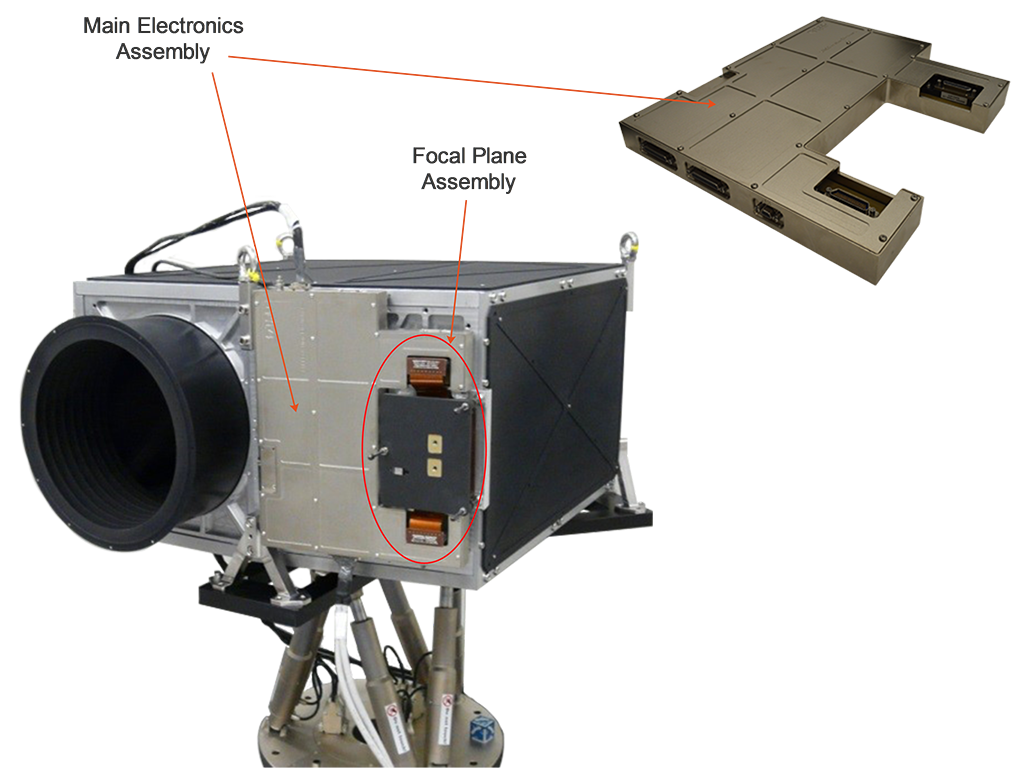
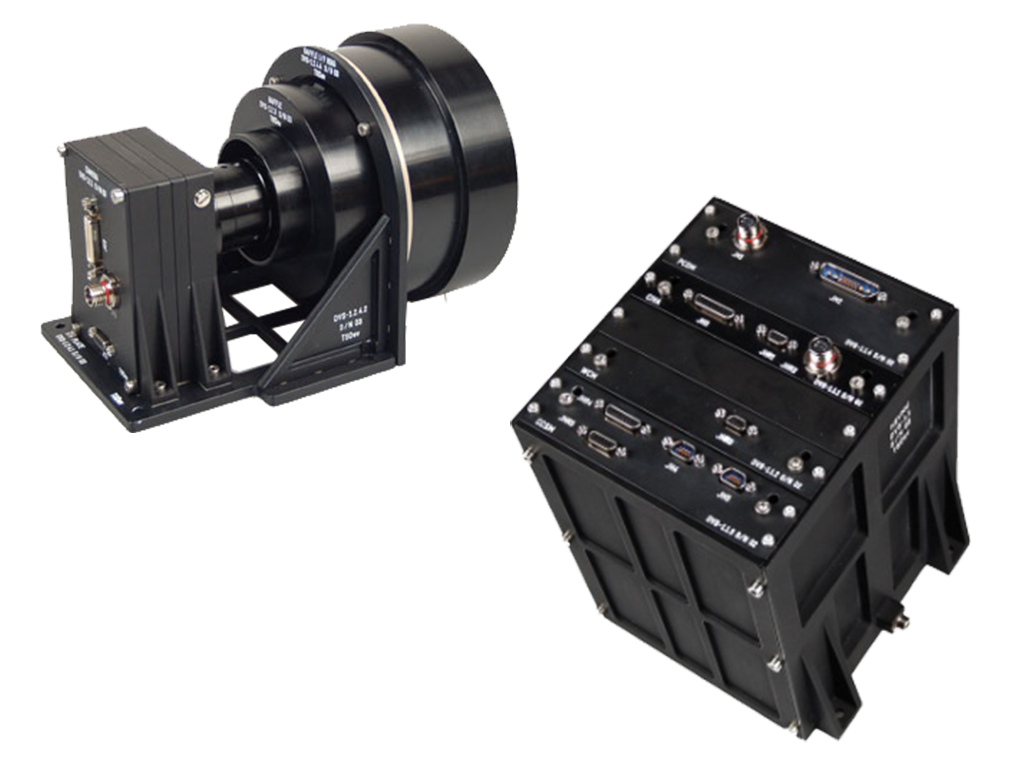
The Camera system, based on a high-resolution optical unit and a video management unit – named H2VMU (High Resolution/High Frame Rate Video Management Unit) – was located on-board the Main Spacecraft and aimed at acquiring video sequences of the target spacecraft, mainly during in-orbit maneuvers, and also Earth images.
Two spacecrafts, launched on June 15, 2010, were nominally operated till August 2014, when a malfunction in the propulsion system caused the end of the mission. During the 4+ years of mission, the TSD’s Camera System collected and made available on Ground a huge number of images, thus allowing the verification of the AOCS and GNC performance and the overall system status.